-
Courriel
hengleyiqi@163.com
-
Téléphone
18340091069
-
Adresse
Xixi Xian Road, district central, ville de Jinan, Province du Shandong
Catégories de produits
- Fatigue automobile
- Banc d'essai structurel
- Système d'essai de chargement de treillis en acier
- Appareil d'essai multifonctionnel pour la mécanique des structures
- Système de rack de réaction
- Machine d'essai de fatigue Pulsatile
- Système de chargement mécanique
- Matériaux similaires
- Servo électrohydraulique
- Machine d'essai de fatigue de torsion
Jinan Heng le xingke Instruments Co., Ltd

Système d'essai de clip de baguette de récupération de fusée - hjhs01
NégociableMise à jour sur11/20
- Modèle
- Nature du fabricant
- producteurs
- Catégorie de produit
- Lieu d'origine
Vue d'ensemble
Système d'essai de préhension de baguettes de récupération de fusée - hjhs01 $R $N $R $N dispositif expérimental de préhension de récupération de fusée - hlzz $R $N $R $N système expérimental de préhension de récupération de fusée - hengle instruments $R $N $R $N système expérimental de préhension de récupération de fusée $R $N $R $N système expérimental de préhension de baguettes de récupération de fusée
Détails du produit
Système d'essai de clip de baguette de récupération de fusée - hjhs01
Unité expérimentale de préhension de récupération spatiale - hlzz
Système de préhension de récupération de fusée - hengle instruments
Système d'essai de préhension de récupération de fusée
Système d'essai de clip de baguette de récupération de fusée
Dispositif expérimental de préhension de récupération de fusée
Système d'essai de préhension de récupération spatiale

Système d'essai de clip de baguette de récupération de fusée - hjhs01,Comme deux énormes bras robotiques, ils sont montés de chaque côté du lanceur, comme deux « baguettes» flexibles. Lorsqu'il termine sa mission et retourne au sol, il ajuste automatiquement son attitude et vole lentement au - dessus de la rampe de lancement. Au moment même où il s'approchait de la rampe de lancement, la paire de bras robotisés sortirait avec précision, serrant délicatement le Huojia comme des boulettes à baguettes, le laissant reposer fermement sur la rampe de lancement sans qu'il ait à atterrir laborieusement lui - même. Cet appareil est en fait une « machine à attraper des poupées» de haute technologie. Il repose sur plusieurs principes scientifiques:
(1) Calcul: le bras robotique doit calculer la vitesse de vol, la direction et l'altitude du huojian, ajuster la position en temps opportun, garantir que les « baguettes» peuvent tenir le huojian. C'est comme si les "griffes" d'une machine à poupée devaient viser la tête de la poupée.
(2) contrôle de la posture: le huojian doit ajuster son angle et sa vitesse lors de l'atterrissage pour qu'il "glisse" lentement et directement vers le bas. C'est comme si vous deviez contrôler l'angle et la force de vos bras lorsque vous lancez une balle de basket - ball, assurez - vous que la balle rentre dans le panier.
(3) Système de rétroaction: le huojian et le bras robotique sont équipés de capteurs qui peuvent réagir rapidement aux changements environnementaux. Une fois que le huojian s'écarte légèrement de la piste prédéterminée, le système corrige immédiatement, en s'assurant qu'il est amarré à la "baguette".
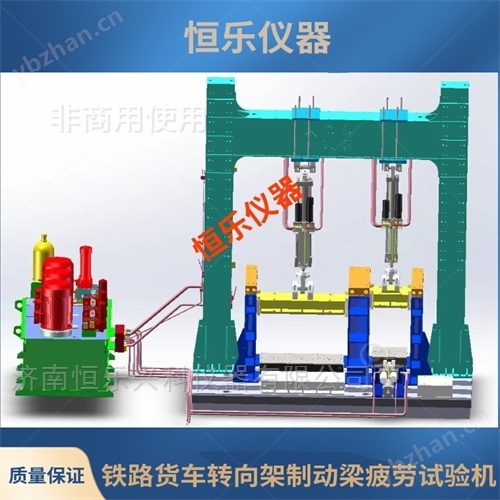
II. Paramètres techniques
1) actionneur: diamètre de trou de passage 60mm, conception modulaire.
2) poussée nominale de l'actionneur: 500 kN;
3) Capteur de charge: capteur de charge à rayons de haute précision;
4) plage de mesure de charge et résolution: 4% à 100% FS, résolution de mesure de charge: 0,1 kN;
5) Précision de mesure de charge: ± 1% de la valeur indiquée dans la plage de 4 à 100%;
6) Course nominale de chargement: 200mm;
7) la résolution angulaire du capteur d'inclinaison est supérieure à 0,01 degré;
8) vitesse nominale de l'actionneur: 2,5 mm / s;
Iii. Servo - chargeur électrohydraulique statique
1, 20000kn vertical Servo - hydraulique actionneur de charge, poussée: 20000kn, Traction: 6000kn; course: 600mm. (± 300mm);
2, le cadre principal un côté horizontal à Servo - hydraulique électro - charge actionneur, poussée 6000kn, traction 4000kn; course ± 400mm.
Iv. Système de contrôle
1. Un ensemble de logiciels et de contrôleurs de système de contrôle de chargement mécanique multifonctionnel, les principales fonctions du logiciel comprennent: contrôle de contrainte constant, contrôle de déplacement constant, contrôle de déformation constant, peut définir certaines étapes du cycle. Et peut réaliser une conversion sans impact entre plusieurs modes de contrôle, réaliser un contrôle en boucle fermée entièrement automatique. Le contrôle du déplacement, de la charge, de la contrainte et du temps de rétention peut être réalisé en au moins quatre étapes.
2. Condition de fin de l'étape expérimentale, qui peut être sélectionnée: valeur de charge, valeur de déplacement, valeur de déformation, valeur de contrainte, valeur de déformation, taux d'atténuation de charge, incrément de charge, augmentation de déplacement, incrément de déformation, incrément de contrainte, incrément de déformation, valeur de charge atténuée, etc., lorsque cette condition est atteinte, l'expérience est automatiquement arrêtée et les données et les courbes sont automatiquement enregistrées,

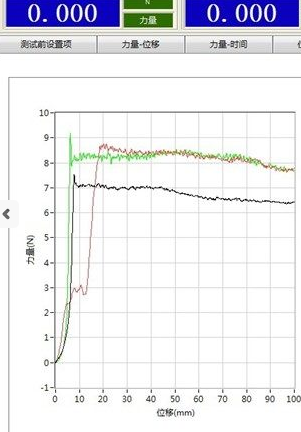

Le logiciel dispose d'une fonction d'affichage visuel des données d'essai, capable de courbes de temps réel, de courbes d'hystérésis, d'affichage numérique et d'animation des vibrations structurelles pendant l'essai.
Heng le xingke adhère à l'esprit d'entreprise de « qualité * », basé sur l'honnêteté, le développement de l'innovation scientifique et technologique, afin de fournir aux utilisateurs des solutions complètes de test d'essai avec enthousiasme.
Heng le xingko Mission: « poursuivre *, revitaliser la technologie », un effort constant pour revitaliser l'industrie nationale!
Produit similaire Recommander